Reverse Thinking
Maximum Segment Sum After Removals
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
private long[] parents;
public long[] maximumSegmentSum(int[] nums, int[] removeQueries) {
// reverse union-find
int n = nums.length;
this.parents = new long[n];
// max long is used to mark unvisited
Arrays.fill(parents, Long.MAX_VALUE);
long[] answer = new long[n];
for (int i = n - 1; i > 0; i--) {
int q = removeQueries[i];
parents[q] = -nums[q];
// unions with left interval
if (q > 0 && parents[q - 1] != Long.MAX_VALUE) {
union(q, q - 1);
}
// unions with right interval
if (q < n - 1 && parents[q + 1] != Long.MAX_VALUE) {
union(q, q + 1);
}
answer[i - 1] = Math.max(answer[i], -parents[find(q)]);
}
return answer;
}
private int find(int u) {
return parents[u] < 0 ? u : (int)(parents[u] = find((int)parents[u]));
}
private void union(int u, int v) {
int pu = find(u), pv = find(v);
// negated sum
parents[pv] += parents[pu];
parents[pu] = pv;
}
This problem can also be resolved by TreeMap of intervals.
Execution of All Suffix Instructions Staying in a Grid
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
// notice the direction is opposition to the instruction
// because we will process the instructions in reverse order
private static final Map<Character, int[]> DIRECTIONS = Map.of(
'U', new int[]{1, 0},
'L', new int[]{0, 1},
'D', new int[]{-1, 0},
'R', new int[]{0, -1}
);
public int[] executeInstructions(int n, int[] startPos, String s) {
// offset[i]: steps to move off the grid from the start position in the i-th direction
// {top, left, bottom, right}
//
// assume the grid has no boundary
int[] offsets = {startPos[0] + 1, startPos[1] + 1, startPos[0] - n, startPos[1] - n};
int m = s.length();
// maps[i]: {pos[i], last seen instruction index when robot is at pos[i]}
Map<Integer, Integer>[] maps = new Map[2];
maps[0] = new HashMap<>(); // horizontal
maps[1] = new HashMap<>(); // vertical
maps[0].put(0, m);
maps[1].put(0, m);
// virtualPos[i]: the virtual location that if the robot starts here at the i-th instruction
// finally it will reach (0, 0) following the remaining instruction sequence
//
// assume the robot starts from the i-th instruction and ends at the top border (-1) at a certain instruction
// at the i-th time, the mirror robot is at (pos[0], pos[1])
// now we are computing which row is the end row of virtual robot
// denote the end position of mirror as (virtualEnd[0], virtualEnd[1])
// in the vertical direction, we have:
// startPos[0] - (-1) = virtualPos[0] - virtualEnd[0]
// virtualEnd[0] = virtualPos[0] - (startPos[0] + 1)
// = virtualPos[0] - offset[top]
//
// now we processes the instructions in reverse order
int[] virtualPos = new int[2], answer = new int[m];
for (int i = m - 1; i >= 0; i--) {
int[] instr = DIRECTIONS.get(s.charAt(i));
virtualPos[0] += instr[0];
virtualPos[1] += instr[1];
int min = m - i;
for (int j = 0; j < offsets.length; j++) {
// 2 * m - (i + 1) >= m, so we use it as the default value
// if there was an instruction with index j when virtualPos equals this threshold (virtualPos - offset)
// then the real robot will be at border at index j
// so the feasible instructions are (j - i - 1)
min = Math.min(min, maps[j % 2].getOrDefault(virtualPos[j % 2] - offsets[j], 2 * m) - i - 1);
}
maps[0].put(virtualPos[0], i);
maps[1].put(virtualPos[1], i);
answer[i] = min;
}
return answer;
}
For example, n = 2, startPos = [1,1], s = "LURD"
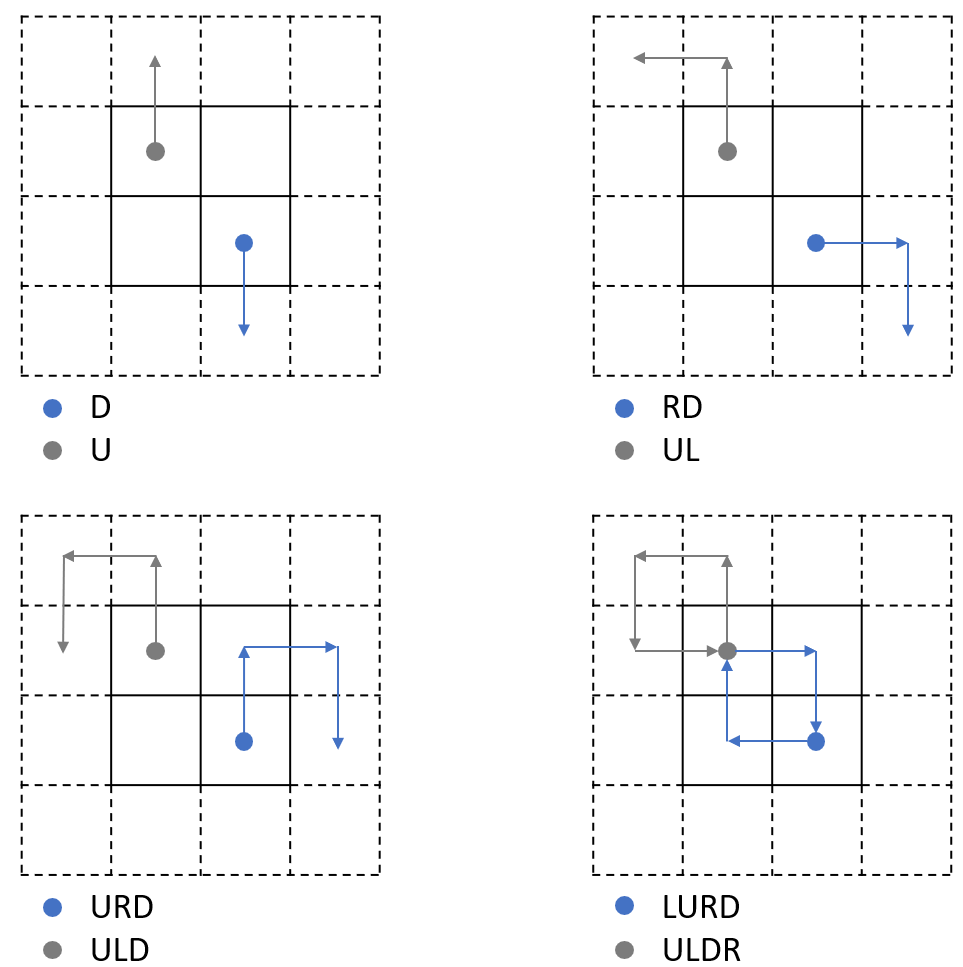
We can see at each instruction, the virtual robot will eventually reach (0, 0) following the remaining instruction sequence.
This post is licensed under CC BY 4.0 by the author.